Consider a simple closed contour and a transfer function .
Then, will encircle the origin in a clockwise direction times, where
number of zeros of inside
number of poles of inside
Assumption: the contour does not pass through any poles or zeros.
Definition
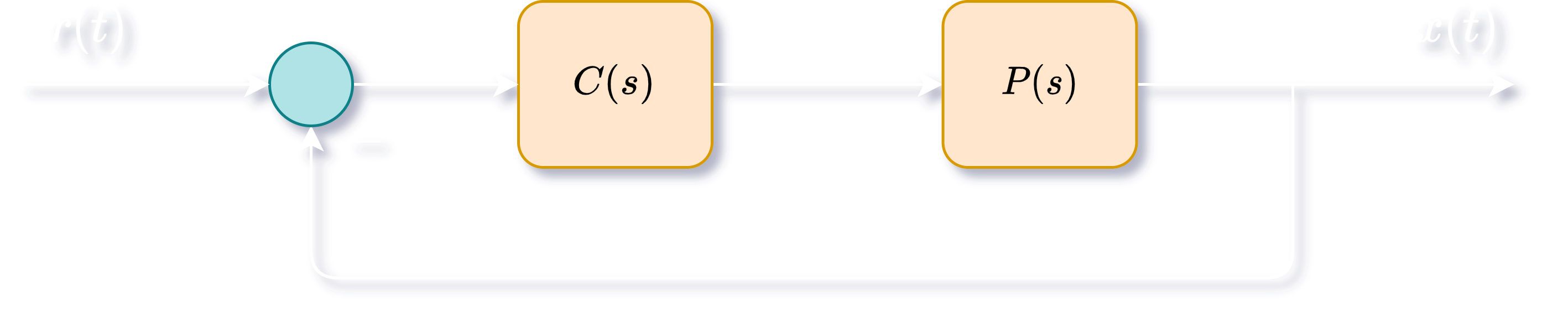
Consider a unity feedback system with reference signal , output signal , plant and controller .
If we define such that,
Then,
where the closed loop poles are solutions to .
Define . Letting :
This shows that poles of are poles of (open-loop poles) and zeros of are poles of (closed-loop poles)
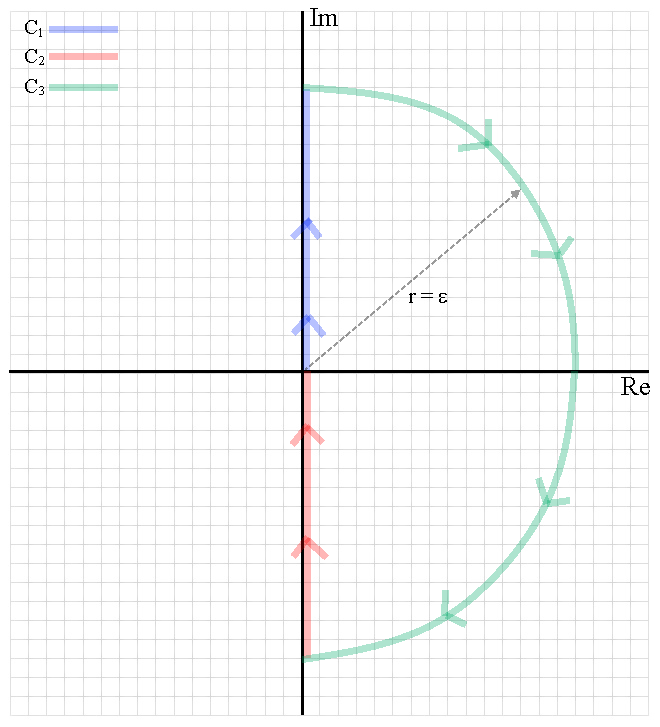
Define a contour C such that:
: all points as ranges from to
: all points as ranges from to
: semicircle of infinite radius, , where , and goes from to
is called the Nyquist plot of .
Principle of the Argument:
where
number of times the Nyquist plot encircles the origin
number of zeros of enclosed by ,i.e., number of closed-loop poles in RHP
number of poles of enclosed by ,i.e., number of open-loop poles in RHP
Nyquist plot can also be generated for , where number of times the Nyquist plot encircles (since )
Drawing Nyquist Plots
Contour
Contour consists of points where ranges from to . Therefore, each point on is just a complex number with magnitude and phase .
can be traced out by looking at the variation of the Bode plot of .
Contour
Contour consists of points where ranges from to . Therefore, each point on is just a complex number with magnitude and phase . In other words, it is the complex conjugate of .
is the mirror of about the real axis.
Contour
Contour consists of points in the semicircle , where , and goes from to . contains points of the form . Since is infinite, the term in with the highest power of will dominate.
If is strictly proper, .
If is proper, (but not strictly proper), is a constant
Stability Margins
We can determine the stability margins using the Nyquist plot.
Gain Margin is the gain required to make the Nyquist plot intersect the negative real axis at -1. In other words, the length from the origin to the point where the Nyquist plot intersects the negative real axis is .
Phase Margin is the angle between the point where the Nyquist plot enters the unit circle and the -1 point about the origin.