Reference Tracking
Consider a unity feedback system with reference signal , output signal , plant and controller .
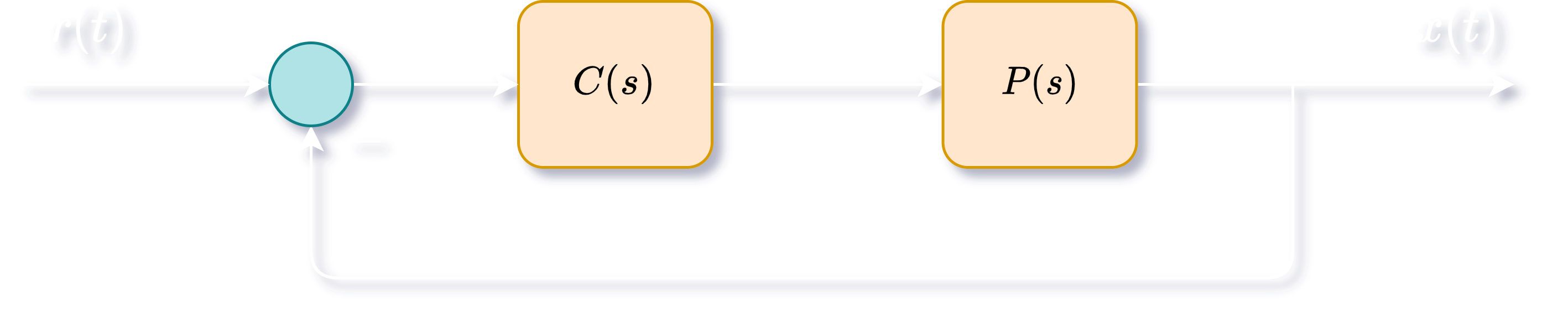
The transfer function from to is:
We can write as:
where is not a root of .
For a reference signal of the form,
where k is a constant and m is a non-negative integer, we can assess the error function :
We know,
There value of affects the tracking of the reference signal and depends on the relative values of and .
| Case | Condition | |
|---|
| Perfect Tracking | | 0 |
| Constant Tracking | | |
| No Tracking | | |